Liftek elektromos berendezései
 A lift egy ciklikus emelőgép, amelyet emberek és áruk függőleges emelésére terveztek. Megbeszélés szerint a liftek utas-, teher-utas-, kórház- és teherszállítókra vannak osztva.
A lift egy ciklikus emelőgép, amelyet emberek és áruk függőleges emelésére terveztek. Megbeszélés szerint a liftek utas-, teher-utas-, kórház- és teherszállítókra vannak osztva.
A kocsi sebességétől függően a lifteket kis sebességűre (0,71 m/sec), nagysebességűre (1-1,6 m/sec), nagysebességűre (2-4 m/sec) és nagysebességű (4 - 10 m / s) ... Az utasszállító felvonók teherbírása 320-1600 kg, teherfelvonók - 160-5000 kg. Legfeljebb 1,6 m / s sebességgel az elektromos motort egy sebességváltón keresztül csatlakoztatják a vonógerendához, ha a sebesség nagyobb, akkor sebességváltó nélküli elektromos hajtásokat használnak.

A személy- és teherliftek tervezési lehetőségeinek széles skálájával a fő eszközök az emelő, a kötelek, az autó, az ellensúly, a mechanikus fék és a vezérlőberendezések. A modern felvonók ellensúlyos felfüggesztési rendszerrel és ellensúlyos kötéllel rendelkeznek.

A kabin függőleges sínek mentén mozog.A fülke a vontatóhuzalt körülvevő és az elektromos csörlőhajtás csigáját vezető kötelekre van felfüggesztve. A kötél végein egy ellensúly található, amely a vezetők mentén mozog. Az ellensúly tömege egyenlő a kabin tömegének és (0,42-0,5) a rakomány tömegének (vagy a legvalószínűbb kabinterhelés felével) összegével.
Lift hajt
A felvonókban és teherfelvonókban az elektromos hajtások típusait a mozgás sebességétől, az épület emeleteinek számától és a szükséges fékezési pontosságtól függően választják ki. Jelenleg a következő elektromos hajtások vannak használatban:
a) legfeljebb 17 emeletes épületekhez 0,7-1,4 m / s sebességű, 320 400 kg teherbírású kis- és nagysebességű lifteket használnak. Ezek a felvonók elektromos hajtást használnak egy aszinkron kétsebességes villanymotorral, amelynek forgórésze mókusketrecben van,
b) 1,6 m / s sebességű, legfeljebb 25 emeletes épületekre szánt nagysebességű személyliftekhez a tirisztoros feszültségszabályozó rendszer (TRN) szerinti elektromos hajtás kétsebességes aszinkron motorral (TRN-ADD ) használt.

Az állítható elektromos hajtás jelenléte biztosítja a gyorsítási és lassítási folyamatok nagyfokú zökkenőmentességét, a padlón való megállás nagy pontosságát (20 mm-ig), valamint a csökkentett sebességű szakasz hiányát a megállás előtt. A motor második tekercselése a nagyjavítás során alacsony fordulatszám elérésére szolgál,
c) a gyors- és nagysebességű felvonóknál a tirisztoros átalakító-TP-D motorrendszer szerinti állandó elektromos hajtásokat és a GGCH-AD frekvenciaváltó-zárlatos aszinkron villanymotor rendszer szerinti váltóáramot alkalmaznak.
Tirisztoros elektromos hajtás ULMP-25-16 típusú liftből
Az elektromos hajtás (1. ábra) tápellátását indításkor és egyenletes mozgáskor reverzibilis tirisztoros feszültségszabályozó UZ (TRN), valamint egy UZ1 egyfázisú hídáramkör szerint összeállított külön egyenirányító biztosítja a tápellátást. állórész tekercselés dinamikus fékezés közben.
A rendszer paraméteres fázisszabályozást biztosít egy mókuskalitkás indukciós motor forgási sebességére. Az automatikus vezérlőrendszer egy KR1816VB031 típusú egychipes mikroszámítógépen készül, amely egy kétsebességes aszinkron villanymotor forgási sebességének közvetlen digitális vezérlését végzi.
Az automatikus vezérlőrendszer nagy pontosságot biztosít a beállított sebesség betartásában és a kívánt padlószinten történő megállásban, közvetlenül a beállított értékig, csökkentett sebességű szakasz nélkül. A motor második tekercsét csak a nagyjavítás során kapcsolják be.
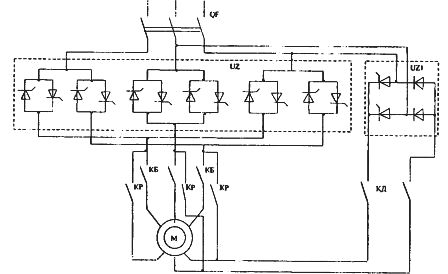
Rizs. 1. A felvonó tirisztoros elektromos meghajtásának vázlata
Fék mágnesszelepek
A felvonók emelőszerkezetei speciális fékberendezésekkel vannak felszerelve rövid löketű és rövid löketű egyenáramú elektromágnesekkel, amelyek egyenirányítón keresztül 220 vagy 380 V-os hálózatra csatlakoznak.
Liftvezérlő berendezések
Mozgásvezérlő áramkörök kapcsolására tervezett padlókapcsolók. Regisztrálják az autó helyzetét, automatikusan kiválasztják a mozgás irányát ("fel" vagy "le"), és fékezéskor parancsot adnak az elektromos hajtás kikapcsolására.Szerkezetileg ezek háromállású (1-0-2) hárompontos karos kapcsolók (mozgásvezérlő eszközök), amelyek mozgathatók (a karon) rögzített (a testen lévő) érintkezőkhöz.
A padlókapcsolók az aknába a padló szintjén vannak felszerelve, és a fülkében van egy öntött ág, amely a padlókapcsoló karjára hat.
Amikor a kabin "felfelé" mozog a kar elfordításával, a rögzített érintkezők egyik csoportja bezárul, és "lefelé" - egy másik. Amikor az autó padlószinten áll, a padlókapcsoló semleges «O» állásban van, és a rögzített érintkezők nyitva vannak.

A sebességkapcsolókat úgy tervezték, hogy impulzust adjanak a sebesség csökkentésére a jármű leállítása előtt. Elektromos meghajtású, kétsebességű gyorsliftekben használják. A padlókapcsolók elvén épülnek, de eltérő kialakításúak. A fordulatszám-kapcsolók a bányaaknában kompletten, a padló felett és alatt vannak beépítve 0,5-0,6 m távolságra.
A karos kapcsolók vezérelt teherfelvonók működtetésére szolgálnak. Szerkezetileg ezek háromállású karos kapcsolók, amelyek a fogantyút semleges helyzetbe ("felső" -0- "alsó") önműködően visszaállítják, a kabinba szerelve. A fogantyú elfordításával kiválasztható a mozgás iránya, amelyet egy pár rögzített érintkező zárásával érünk el. A fogantyú elengedésekor az érintkezők kinyílnak, és a motor leáll (kikapcsol). A kapcsolók egyidejűleg használhatók végálláskapcsolóként a fülke végállásaiban. Ezt a bánya tengelyében lévő speciális vezetők görgőjén lévő kar működtetésével érik el.
Induktív érzékelők, amelyeket nagy sebességű felvonókhoz terveztek. Az ilyen váltakozó és egyenirányított áramú érzékelők diagramja az ábrán látható. 2.
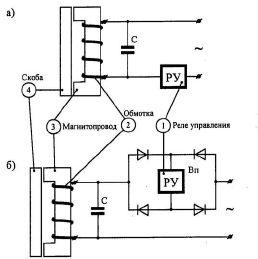
Rizs. 2. Váltakozó (a) és egyenirányított (b) áramú induktív érzékelők vázlata
A bányaaknába U-alakú 3 acélból készült laminált mágneses áramkör van beépítve, a kabinon pedig egy acél tartó 4 található, ami egy mágneses sönt. A mágneses áramkörön van egy tekercs 2 tekercseléssel, amelyre az 1. vezérlőrelé közvetlenül vagy Vp egyenirányítón keresztül csatlakozik. Amikor a bilincs kilép (a mágneses áramkör kinyílik), a tekercs induktív ellenállása kicsi, ami biztosítja a vezérlőrelé működését. Ha az acélkonzol átfedi a mágneses áramkört, a tekercs induktív ellenállása meredeken megemelkedik, és a relé kiold.
A vezérlőrelé működésének megbízhatóságát és tisztaságát a C kapacitás beépítése biztosítja a tekercssel párhuzamosan, amelyet az áramok rezonanciájához közeli üzemmód megszerzésének feltételéből választanak ki. Az egyenirányító használata a vezérlőrelé táplálására növeli a relé mágneses rendszerének működésének megbízhatóságát.
Ezenkívül a hermetikus érintkező eszközöket (reed-kapcsolókat) széles körben alkalmazzák az utazási érzékelőkben. Az induktív érzékelők alkalmazása kiküszöböli a padlókapcsolók és sebességkapcsolók olyan hátrányait, mint az érintkezőeszközök működéséből adódó zaj és rádióinterferencia.
A mágneses rétegezés a kabinba beépített elektromágneses eszköz, amely a bányaajtó zárainak működését vezérli. A mágneses ághatároló az elágazó elektromágnes armatúrájához csatlakozik.Amikor a vezetőfülke a padlón van, az elágazó elektromágnes légtelenítve van, a rugós retesz kioldja a bányaajtó zár reteszét, lehetővé téve az kinyitást.
Mozgás közben az ág elektromágnese feszültség alá kerül - a retesz be van vezetve, ami megtiltja az ajtó kinyitását. Az ilyen zárakat régi kialakítású (vagy korszerűsített) felvonókban alkalmazzák kézi aknaajtó működtetéssel.

Liftek automatizálása
A fő különbség a felvonók és az emelők működése között a többpozíciós helyzetük, ami abban nyilvánul meg, hogy a mechanizmusok nagyszámú rögzített pozíciót elfoglalhatnak. Ezért minden megállás után meg kell oldani a következő lépés kiválasztásának logikai problémáját. A probléma megoldását jelenleg logikai chipek és mikroprocesszorok segítségével valósítják meg. A felvonó vezérlési sémához a következő feladatok vannak beállítva: a fülke pozíciójának ellenőrzése az aknában, a mozgás irányának automatikus kiválasztása, a megállás kezdő időpontjának meghatározása, a kabin pontos megállítása a padlón, automatikus nyitás ajtók zárása, elektromos hajtások és liftek védelme.
Az autó mozgási programját beállító parancsjelek két típusra oszthatók: az autóból érkező „parancsokra”, illetve a leszállóhelyről érkező „hívásokra”. A parancsok a pilótafülkében, illetve a padlóterületen található gombokon keresztül adhatók meg. A parancsokra adott választól és azok feldolgozási módszerétől függően a különálló és a kollektív vezérlési sémák különböznek.Külön vezérlési elv esetén az áramkör csak egy parancsot észlel és hajt végre, és annak végrehajtása során nem válaszol más parancsokra és hívásokra.
Ez a séma a legegyszerűbben megvalósítható, de korlátozza a lift lehetséges jellemzőit, ezért csak legfeljebb kilenc emelet magas, viszonylag kis utasforgalommal rendelkező lakóépületek liftjéhez használható. A kollektív vezérlés elvén az áramkör több parancsot kap egyszerre, és azokat meghatározott sorrendben hajtja végre, általában az emeletek sorrendjében.

A liftvezérlő rendszer alapja az emeleti óramérés. Az óra tanulmányozása lehet inga, amikor a rögzítés két irányban történik, alulról felfelé és fentről lefelé, és egy irányban, például csak fentről lefelé. Az ingahintát gyakrabban használják.