Felvonók és emelőgépek motorjainak kiválasztása teljesítmény szerint
 A lakó- és adminisztratív épületek modern személy- és teherliftjeit, valamint néhány bányaemelő gépet ellensúllyal vagy, ahogyan néha nevezik, ellensúllyal hajtják végre. A bányászati gépekben a kiegyensúlyozást, mint már említettük, gyakran nem ellensúllyal, hanem egy második emelőedénnyel végzik.
A lakó- és adminisztratív épületek modern személy- és teherliftjeit, valamint néhány bányaemelő gépet ellensúllyal vagy, ahogyan néha nevezik, ellensúllyal hajtják végre. A bányászati gépekben a kiegyensúlyozást, mint már említettük, gyakran nem ellensúllyal, hanem egy második emelőedénnyel végzik.
A felvonók ellensúlyát úgy választják ki, hogy egyensúlyba hozza az emelőhajó (kocsi) súlyát és az emelendő névleges teher egy részét:

ahol GH a névleges emelőterhelés súlya, N; G0 – kabin tömege, N; Gnp az ellensúly súlya, N; α a kiegyenlítő tényező, általában 0,4-0,6-nak számít.
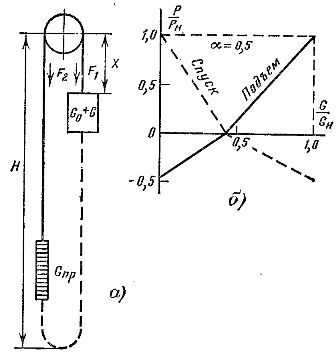
Rizs. 1. A felvonómotor tengelyének terhelésének kiszámítása.
A nehéz hajók kiegyensúlyozásának szükségessége nyilvánvaló, mivel ezek mozgatásához ellensúly hiányában a motorteljesítmény megfelelő növelésére van szükség. A névleges hasznos teher egy részének kiegyensúlyozásának képessége egy adott terhelési görbe egyenértékű teljesítményének meghatározásakor derül ki.Nem nehéz követni például, hogy ha a lift főként a rakomány emelésére és az üres fülke leeresztésére dolgozik, akkor a terhelési diagram szerinti egyenértékű motorteljesítmény α = 0,5-nél van minimuma.
Az ellensúly jelenléte a motor terhelési görbéjének ellaposodásához vezet, ami csökkenti a felmelegedést működés közben. ábrán látható diagramra hivatkozva. 1, a, majd az ellensúly súlyértékével

és a kiegyensúlyozó kötél és a kabin súrlódása, valamint a vezetőkön lévő ellensúly hiánya, írhatja:


ahol gk 1 m kötél tömege, N / m.
Szakítószilárdság

A motor tengelyének nyomatékát és teljesítményét a következő képletek alapján kell meghatározni:
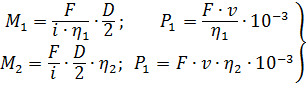
ahol M1, P1 – nyomaték és teljesítmény, amikor a hajtás motor üzemmódban működik, Nm, illetve kW; M2, P2 – nyomaték és teljesítmény, amikor a hajtás generátor üzemmódban működik, Nm, illetve kW; η1, η2 — csigahajtómű hatékonysága közvetlen és fordított energiaátvitellel.
η1 és η2 értékei nemlineárisan függenek a csigatengely fordulatszámától, és a képletekkel számíthatók ki
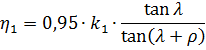

itt λ a spirálvonal emelkedési szöge a csiga mutatóhengerén; k1 olyan együttható, amely figyelembe veszi a sebességváltó csapágyainak és olajfürdőjének veszteségeit; ρ — súrlódási szög, a csigatengely forgási sebességétől függően.
A vonótárcsára ható erő képletéből az következik, hogy kiegyensúlyozó kötél hiányában az emelőcsörlő elektromos meghajtásának terhelése az emelőedény helyzetétől függ.
Nagy teherbírásuk - akár 10 tonnáig, nagy mozgási sebességük - 10 m / s és több, nagy, 200-1000 m-es emelési magasságuk és zord munkakörülményeik miatt a bányaemelő gépek nagy tömegű acélkötelekkel vannak felszerelve. Képzelje el például, hogy az egyik menetet leengedik az alsó horizontra, míg a másik felül van, és abban a pillanatban kirakják. Ebben a helyzetben a teljes fejkötél kiegyensúlyozatlan, és az emelkedés kezdetén a motornak le kell győznie a teher és a kötél súlya által keltett statikus nyomatékot. A kötél egyensúlyozása az ugrások útjának közepén történik. Ezután ismét eltörik, és a kötél leszálló részének súlya segít a motor tehermentesítésében.
Az egyenetlen terhelés, különösen a mélybányákban, a motorteljesítmény túlbecsléséhez vezet, ezért 200-300 m-nél nagyobb emelési magasságnál ajánlatos a fejemelő kötelek kiegyensúlyozása felfüggesztett farkötelekkel. az emelőedények közül. Általában a farkötelet ugyanolyan keresztmetszetű és hosszúságú kötéllel választják ki, mint a fő, aminek eredményeként az emelőrendszer kiegyensúlyozottnak bizonyul.
Mivel a terhelés a felvonók és emelőgépek működése során változik, a motortengely teljesítményének vagy nyomatékának minden egyes terheléshez történő meghatározásához célszerű felépíteni egy grafikont ezen értékeknek a terheléstől való függéséről. több ponton, amely megközelítőleg ugyanolyan jellegű, mint az 1. ábrán látható. 1b, majd használja fel a terhelési diagramok elkészítéséhez.
Ebben az esetben ismerni kell az emelőgép elektromos hajtásának üzemmódját, amit nagyban meghatároz a PV aktiválásának relatív időtartama és a motor óránkénti indítási száma. A felvonóknál például az elektromos hajtás működési módját a beépítés helye és a felvonó rendeltetése határozza meg.
A lakóépületekben a forgalmi menetrend viszonylag egységes, a relatív időtartam – PV és motorindítási gyakoriság h 40%, illetve 90-120 indítás óránként. A sokemeletes irodaházakban a felvonók terhelése meredeken növekszik a dolgozók érkezése és távozása idején, ennek megfelelően az ebédszünetben a magas értékek PV és h-40-60% és 150 -200 indítás óránként.
A rajz elkészülte után statikus terhelés a motor tengelyén, az elektromos hajtásrendszer és az emelőmotor kiválasztása megtörtént, elvégezhető a terhelési diagram elkészítésének második szakasza – figyelembe véve a tranziens terhelési diagramra gyakorolt hatását.
A teljes terhelési diagram felépítéséhez figyelembe kell venni az elektromos hajtás gyorsulási és lassulási idejét, az ajtók nyitásának és zárásának idejét, a megállások számát az autó mozgása során, az időt az utasok be- és kiszállása a legjellemzőbb munkaciklus során. Az önműködő ajtós felvonóknál az ajtók működése és a kabin feltöltése által meghatározott teljes időveszteség 6-8 s.
Az autó gyorsulásának és lassításának ideje a mozgásdiagramból meghatározható, ha ismert az autó névleges sebessége, valamint a gyorsulás (lassulás) és a rándulás megengedett értékei. Az elektromos hajtásrendszer jelzett statikus és dinamikus üzemmódjai szerint felépített terhelési diagram szerint szükséges a motor számítási számítása fűtött állapotban, a jól ismert módszerek egyikével: átlagos veszteségek vagy azzal egyenértékű értékek.
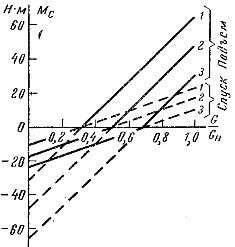
Rizs. 2. Az elektromos hajtás nyomatékának függése a kocsi, a felvonó terhelésétől, amikor ez utóbbi az első emeleten (1), az akna közepén (2) és az utolsó emeleten (3) van.

Egy példa. A nagysebességű személylift műszaki adatai szerint határozza meg a statikus nyomatékokat a motor tengelyén különböző üzemmódokban.
Adott:
• maximális teherbírás Gn = = 4900 N;
• mozgási sebesség v = 1 m/s;
• emelési magasság H = = 43 m;
• kabin tömege G0 = 6860 N;
• ellensúly súlya Gnp = 9310 N;
• a vonógerenda átmérője Dm = 0,95 m;
• a csörlő sebességváltó áttételi aránya i = 40;
• átviteli hatásfok, figyelembe véve a fülke súrlódását a tengelyvezetőkön η = 0,6;
• a kötél súlya GKAH = 862 N.
Asztal 1

Szakítószilárdság:


Amikor a felvonórendszer működik, ha Fc > 0, akkor a vezető elektromos gép motoros üzemmódban működik, és ha Fc 0, és motoros üzemmódban, ha Fc < 0.
A statikus nyomatékok képlet szerinti számításának eredményeit táblázatban foglaljuk össze. ábrán láthatók, és az 1. ábrán láthatók. 2.Vegye figyelembe, hogy a pontosabb számításoknál figyelembe kell venni a tengelyvezetők mozgásával szembeni ellenállást, amely az Fc 5-15%-a.