Váltakozó áramú elektromos gépek
Az elektromos gépeket a mechanikai energia elektromos energiává alakítására használják (AC és DC generátorok) és fordítva (villanymotorok).
Mindezekben az esetekben lényegében három fő felfedezést használnak az elektromágnesesség területén: az áramok mechanikai kölcsönhatásának jelenségét, amelyet Ampere fedezett fel 1821-ben, az elektromágneses indukció jelenségét, amelyet Faraday fedezett fel 1831-ben, és ezeknek a jelenségeknek az elméleti összefoglalását. Lenz (1834) az indukált áram irányának jól ismert törvényében (valójában Lenz törvénye az elektromágneses folyamatok energiamaradásának törvényét jósolta meg).

Ahhoz, hogy a mechanikai energiát elektromos energiává alakítsuk, vagy fordítva, egy vezető áramkör relatív mozgását kell létrehozni egy árammal és egy mágneses mezővel (mágnes vagy áram).
A folyamatos üzemre tervezett elektromos gépeknél a gép mozgó részének (a váltakozó áramú gép forgórészének) az állórészen (az állórészen) belül elhelyezkedő forgó mozgását alkalmazzák.A gép mágneses tér létrehozására szolgáló tekercsét induktornak, az üzemi árammal körbefolyó tekercset pedig armatúrának nevezzük. Mindkét utóbbi kifejezést egyenáramú gépekre is használják.
A mágneses indukció növelése érdekében ferromágneses testekre (acél, öntöttvas) géptekercseket helyeznek.
Minden elektromos gépnek megvan a reverzibilitása, azaz elektromos energia generátorként és villanymotorként egyaránt használható.

Aszinkron motorok
Aszinkron motorokat használnak az elektromágneses indukció egyik megnyilvánulása… A fizika kurzusokon a következőképpen mutatják be:
A középpontján átmenő függőleges tengely körül forogni tudó rézkorong alatt egy függőleges patkómágnes van elhelyezve, amely ugyanazon tengely körül forog (a lemez és a mágnes közötti mechanikai kölcsönhatás kizárt). Ebben az esetben a tárcsa ugyanabba az irányba kezd forogni, mint a mágnes, de kisebb sebességgel. Ha növeli a tárcsa mechanikai terhelését (például növeli a tengely súrlódását a nyomócsapágyakkal szemben), akkor a forgási sebessége csökken.
Ennek a jelenségnek a fizikai jelentése könnyen megmagyarázható az elektromágneses indukció elméletével: amikor a mágnes forog, forgó mágneses tér jön létre, amely örvényáramot indukál a korongban, ez utóbbi nagysága – egyéb tényezők azonossága mellett – attól függ, a mező és a lemez relatív sebessége.
A Lenz-törvény szerint a korongnak a mező irányába kell forognia. Súrlódás hiányában a korongnak a mágnes sebességével megegyező szögsebességet kell szereznie, ami után az indukált emf eltűnik. A való életben elkerülhetetlenül jelen van a súrlódás, és a lemez lassabb lesz.Nagysága a tárcsa által tapasztalt mechanikai féknyomatéktól függ.
A tárcsa (rotor) forgási sebessége és a mágneses tér forgási sebessége közötti eltérés a motorok nevében tükröződik.
Az aszinkron motorok működési elve:
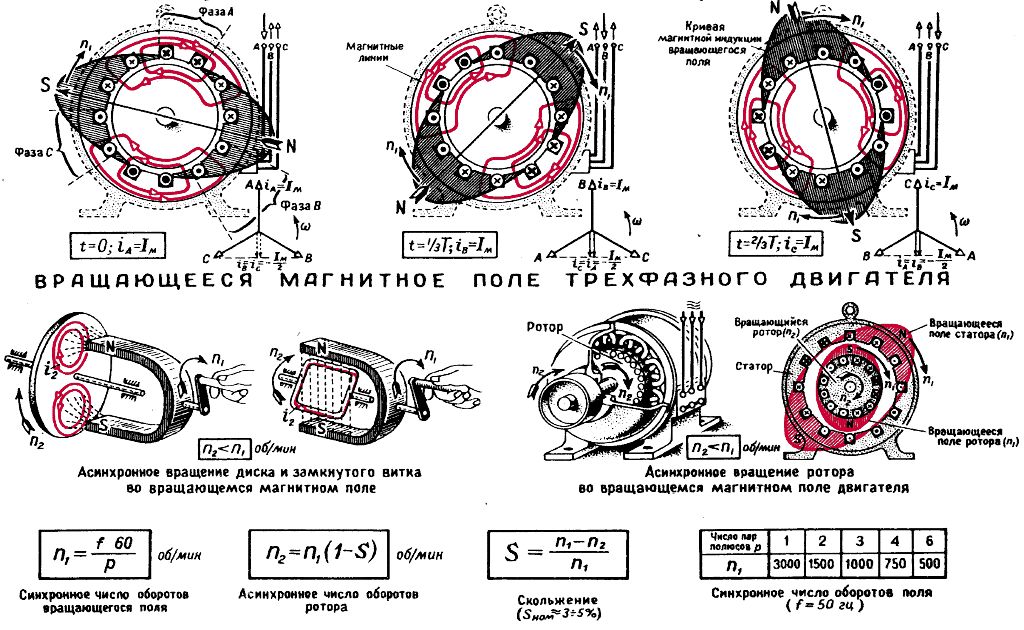
A műszaki aszinkron motorokban (leggyakrabban háromfázisú) forgó mágneses tér jön létre többfázisú áramaz állórész tekercselés körül áramló. A háromfázisú áram frekvenciáján és az állórész tekercseinek száma 3p forgó mező teszi n = f / p fordulat / sec.

Az állórész üregében egy forgatható rotor található. A tengelyéhez forgó mechanizmus kapcsolható.A legegyszerűbb "mókuscellás" motoroknál a forgórész egy acél hengeres test hornyaiba elhelyezett hosszanti fémrudak rendszeréből áll. A vezetékeket két gyűrű zárja rövidre. A nyomaték növelése érdekében a forgórész sugarát elég nagyra kell tenni.
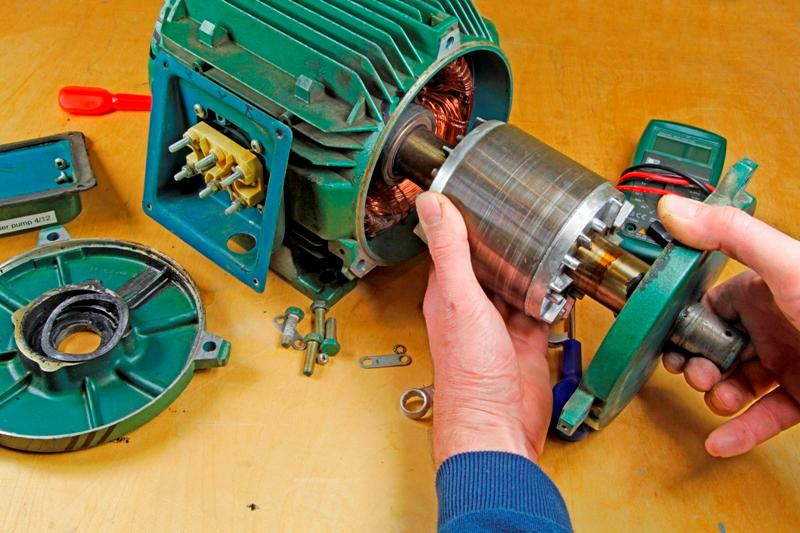
Más motorkonstrukcióknál (jellemzően nagy teljesítményű motoroknál) a forgórész vezetékei nyitott háromfázisú tekercset alkotnak. A tekercsek végeit magában a forgórészben zárjuk rövidre, és a vezetékeket a forgórész tengelyére szerelt három csúszógyűrűhöz hozzák ki, és attól leválasztjuk.
Ezekhez a gyűrűkhöz csúszóérintkezőkkel (kefék) egy háromfázisú reosztát csatlakozik, amely a motor mozgásba hozására szolgál. A motor megfordítása után a reosztátot teljesen eltávolítják, és a rotor mókusketrecsé válik (lásd - Aszinkron motorok tekercselt rotorral).

Az állórész házán kapocstábla található. Az állórész tekercseket hozzájuk hozzák ki. Beleszámíthatók csillag vagy háromszög, a hálózati feszültségtől függően: az első esetben a hálózati feszültség 1,73-szorosa lehet a másodiknak.
A forgórész relatív lassulását az indukciós motor állórészmezőjéhez viszonyítva jellemző értéket ún. csúszás… 100%-ról (a motor beindításának pillanatában) nullára (ideális veszteségmentes forgórész mozgás esetén) változik.
Az indukciós motor forgásirányának megfordítása a motort tápláló elektromos hálózat minden két lineáris vezetőjének kölcsönös kapcsolásával történik.

A mókusketreces motorokat széles körben használják az iparban. Az aszinkron motorok előnyei a tervezés egyszerűsége és a csúszóérintkezők hiánya.
Egészen a közelmúltig az ilyen motorok fő hátránya a fordulatszám-szabályozás nehézsége volt, mert ha ehhez az állórész áramkörének feszültségét megváltoztatják, akkor a nyomaték élesen változik, de technikailag nehéz volt megváltoztatni a tápáram frekvenciáját. A modern mikroprocesszoros eszközöket ma már széles körben használják a tápáram frekvenciájának szabályozására a motorok fordulatszámának változtatása érdekében. frekvenciaváltók.
Generátorok
A generátorok jelentős teljesítményre és nagy feszültségre készültek. Az aszinkron gépekhez hasonlóan két tekercseléssel rendelkeznek. Normális esetben az armatúra tekercselése az állórész házában található. Az elsődleges mágneses fluxust létrehozó induktorok a forgórészre vannak felszerelve, és egy gerjesztő – a rotor tengelyére szerelt kis DC generátor – táplálja őket. A nagy teljesítményű gépeknél a gerjesztést néha egyenirányított váltakozó feszültség hozza létre.
Az armatúra tekercselés mozdulatlansága miatt megszűnnek a nagy teljesítményű csúszóérintkezők használatával járó technikai nehézségek.
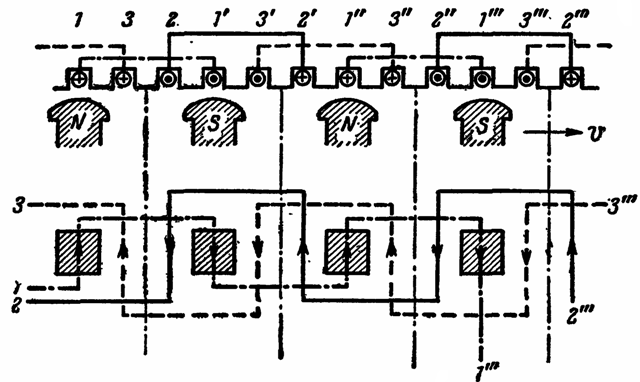
Az alábbi ábra egy egyfázisú generátor vázlatát mutatja. Rotora nyolc pólusú. Ezeken tekercsek találhatók (az ábrán nem látható), amelyeket külső forrásból táplálnak egyenárammal, amelyet a forgórész tengelyére szerelt csúszógyűrűkre vezetnek. A pólustekercsek úgy vannak feltekerve, hogy az állórész felé néző pólusok jelei váltakoznak. A pólusok számának párosnak kell lennie.
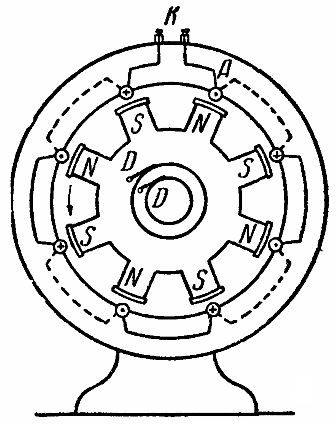
Az armatúra tekercselése az állórész házában található. Hosszú, a rajz síkjára merőleges működő «aktív» vezetékei az ábrán körökkel vannak ábrázolva, ezeket a rotor forgásakor a mágneses indukció vonalai keresztezik.
A körök az indukált elektromos mezők irányainak pillanatnyi eloszlását mutatják. Az állórész elülső oldalán futó összekötő vezetékek folyamatos vonallal, a hátoldalon pedig szaggatott vonallal vannak ábrázolva. A K bilincsek külső áramkör csatlakoztatására szolgálnak az állórész tekercséhez. A forgórész forgásirányát nyíl jelzi.
Ha gondolatban levágja a gépet a K bilincsek között áthaladó sugár mentén, és síkba fordítja, akkor az állórész tekercsének és a forgórész pólusainak (oldal és sík) egymáshoz viszonyított helyzete vázlatos rajzzal lesz ábrázolva:
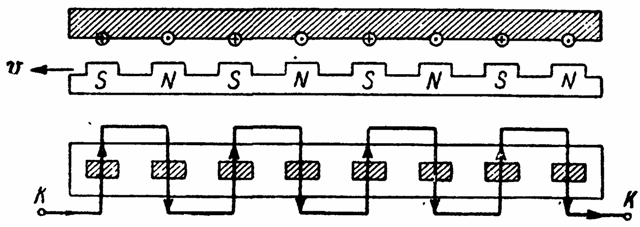
Az ábrát figyelembe véve ügyelünk arra, hogy az összes aktív (az induktor pólusain áthaladó) vezeték sorba legyen kötve, és a bennük indukált EMF összegezze. Az összes EMF fázisa nyilvánvalóan azonos.A forgórész egy teljes forgása során négy teljes áramváltozási periódus érhető el minden vezetékben (és így a külső áramkörben).
Ha egy elektromos gépnek p póluspárja van, és a forgórész n fordulatot tesz másodpercenként, akkor a gép által vett váltóáram frekvenciája f = pn hz.
Mivel a hálózatban az EMF frekvenciájának állandónak kell lennie, a rotorok forgási sebességének állandónak kell lennie. A műszaki frekvenciájú (50 Hz) EMF eléréséhez viszonylag lassú forgást lehet alkalmazni, ha a rotor pólusainak száma elég nagy.
A háromfázisú áram eléréséhez három különálló tekercset helyeznek el az állórész testében. Mindegyikük el van tolva a másik kettőhöz képest az induktorok szomszédos (szemközti) pólusai közötti ívtávolság harmadával.
Könnyen ellenőrizhető, hogy amikor az induktorok forognak, EMF-ek indukálódnak a tekercsekben, fázisban (időben) 120 ° -kal eltolva. A tekercsek végeit eltávolítják a gépről, és csillaggal vagy delta-ban csatlakoztathatók.
A generátorban a mező és a vezető relatív sebességét a forgórész átmérője, a forgórész másodpercenkénti fordulatszáma és a póluspárok száma határozza meg.

Ha a generátort vízáram hajtja (hidrogenerátor), az általában lassú fordulatszámmal készül. A kívánt áramfrekvencia eléréséhez növelni kell a pólusok számát, ami viszont megköveteli a forgórész átmérőjének növelését.
Számos technikai ok miatt erős hidrogéngenerátorok általában függőleges tengelyűek, és a hidraulikus turbina felett helyezkednek el, ami miatt forognak.

Gőzturbinás generátorok – A turbinás generátorok általában nagy sebességűek. A mechanikai erők csökkentése érdekében kis átmérőjűek és ennek megfelelően kis pólusszámmal rendelkeznek.Számos műszaki megfontolás megköveteli a vízszintes tengelyű turbinagenerátorok gyártását.
Ha a generátort belső égésű motor hajtja, akkor azt dízelgenerátornak nevezik, mivel a dízelmotorokat általában olcsóbb üzemanyagot fogyasztó motorként használják.

Generátor reverzibilitás, szinkron motorok
Ha a generátor állórész tekercsére külső forrásból váltakozó feszültséget kapcsolunk, akkor az induktor pólusai kölcsönhatásba lépnek az állórészben keletkező áram mágneses mezőjével, és ugyanabból az irányból nyomatékok hatnak. minden póluson.
Ha a forgórész olyan sebességgel forog, hogy röviddel a váltakozó áram periódusának fele után az induktor következő pólusa (az első pólussal ellentétes előjellel) az állórész tekercsének figyelembe vett vezetéke alá illeszkedik, akkor a kölcsönhatási erő közte és az áram között, amely megváltoztatta az irányát, változatlan marad.
Ilyen körülmények között a forgórész a nyomaték folyamatos hatása alatt tovább mozog, és bármilyen mechanizmust képes meghajtani. A rotor mozgásával szembeni ellenállás leküzdése a hálózat által fogyasztott energia miatt következik be, és a generátor elektromos motor lesz.

Megjegyzendő azonban, hogy a folyamatos mozgás csak szigorúan meghatározott forgási sebesség mellett lehetséges, mivel ettől való eltérés esetén a forgórész mindkét pólusára részben gyorsító nyomaték hat, a forgórész két vezető között mozogva. állórész, az idő egy részében - megállás .
Így a motor forgási sebességét szigorúan meg kell határozni, — az az idő, ameddig a pólus kicserélődik a következőre, egybe kell esnie az áram félperiódusával, ezért az ilyen motorokat ún. szinkronban.
Ha az állórész tekercsére egy álló rotorral váltakozó feszültséget kapcsolunk, akkor bár az áram első félciklusa során a forgórész összes pólusa azonos előjelű nyomatékok hatását tapasztalja, mégis a tehetetlenség miatt a a rotornak nem lesz ideje mozogni. A következő félciklusban a forgórész összes pólusára vonatkozó nyomatékok előjele az ellenkezőjére változik.
Ennek eredményeként a rotor rezegni fog, de nem tud forogni. Ezért a szinkronmotort először fel kell tekercselni, vagyis a normál fordulatszámra kell hozni, és csak ezután kell bekapcsolni az állórész tekercsében lévő áramot.
A szinkronmotorok fejlesztése mechanikai módszerekkel (kis teljesítményen) és speciális elektromos eszközökkel (nagy teljesítményen) történik.
Kisebb terhelésváltozások esetén a motor fordulatszáma automatikusan megváltozik, hogy alkalmazkodjon az új terheléshez. Tehát a motortengely terhelésének növekedésével a forgórész azonnal lelassul. Emiatt megváltozik a fáziseltolódás a vonali feszültség és az ellenkező indukált EMF között, amelyet az induktor indukál az állórész tekercsében.
Ezenkívül az armatúra reakciója az induktorok lemágnesezését hozza létre, így az állórész árama megnő, az induktorok nyomatéka megnövekszik, és a motor ismét szinkronban forog, leküzdve a megnövekedett terhelést. Hasonló folyamat megy végbe a terhelés csökkentésével.
A terhelés éles ingadozása esetén a motornak ez az alkalmazkodóképessége elégtelen lehet, fordulatszáma jelentősen megváltozik, "kiesik a szinkronból" és végül leáll, miközben az állórészben indukált indukciós EMF eltűnik, és a benne lévő áram megnő. élesen. Ezért kerülni kell a terhelés éles ingadozásait. A motor leállításához nyilvánvalóan először le kell választani az állórész áramkörét, majd le kell választani a fojtókat; a motor indításakor be kell tartania a műveletek fordított sorrendjét.
A szinkronmotorokat leggyakrabban olyan mechanizmusok meghajtására használják, amelyek állandó sebességgel működnek. Íme a szinkronmotorok előnyei és hátrányai, valamint indítási módjai: Szinkronmotorok és alkalmazásaik
Oktatási filmszalag - "Szinkronmotorok", amelyet az oktatási-szemléletű eszközök gyára készített 1966-ban. Itt nézheti meg: Filmszalag "Szinkronmotor"
