Érintésmentes érzékelők a mechanizmusok helyzetéhez
 Ebben a cikkben a mechanizmusok helyzetérzékelőiről fogunk beszélni. Alapvetően minden érzékelő fő funkciója az, hogy jelet adjon egy adott esemény bekövetkeztekor. Azaz, amikor trigger esemény történik, az érzékelő aktiválódik, és jelet generál, amely lehet analóg vagy diszkrét, digitális.
Ebben a cikkben a mechanizmusok helyzetérzékelőiről fogunk beszélni. Alapvetően minden érzékelő fő funkciója az, hogy jelet adjon egy adott esemény bekövetkeztekor. Azaz, amikor trigger esemény történik, az érzékelő aktiválódik, és jelet generál, amely lehet analóg vagy diszkrét, digitális.
A határérték-érzékelőket évtizedek óta használják helyzetérzékelőként. kapcsolók. Elektromos érintkezőkből állnak, amelyek mechanikusan nyitnak vagy zárnak, amikor valamilyen változó (pozíció) elér egy bizonyos értéket. A különféle típusú végálláskapcsolók számos vezérlőrendszer fontos részét képezik, amelyek megbízhatósága tőlük függ. az ilyen érzékelők mozgó mechanikai elemeket tartalmaznak, amelyek erőforrásai korlátozottak.
A végálláskapcsolókat jelenleg aktívan helyettesítik különböző közelségérzékelőkkel. Leggyakrabban a következő típusú közelségérzékelők: induktív, generátor, magnetohercon és fotoelektronikai. Ezek az érzékelők nem érintkeznek mechanikusan a mozgó tárggyal, amelynek helyzetét figyelik.
Az érintésmentes helyzetérzékelők biztosítják a mechanizmus nagy sebességét és nagy gyakoriságú bekapcsolását. Ezeknek az érzékelőknek egy bizonyos hátránya a tápfeszültség és a hőmérséklet változásától való függés, pontosságuk. A követelményektől függően ezeknek az eszközöknek a kimeneti eszköze a következő lehet érintésmentes logikai elemés elektromos relé.
Az elektromos hajtások precíziós fékezési sémáiban a közelségérzékelők mind a visszakapcsolás, mind a végső leállítás parancsára használhatók.
Manapság sokféle érzékelő létezik a piacon, de jelen cikk keretein belül a közvetlenül induktív helyzetérzékelők témát emeljük ki, mivel az esetek több mint 80% -ában az induktív érzékelők szolgálnak érzékelőként a mechanizmusok helyzetéhez.
Az induktív érzékelő akkor aktiválódik, amikor a fém megközelíti a trigger zónáját. Emiatt az induktív helyzetérzékelőket jelenlétérzékelőknek, közelségérzékelőknek vagy egyszerűen induktív kapcsolóknak is nevezik.
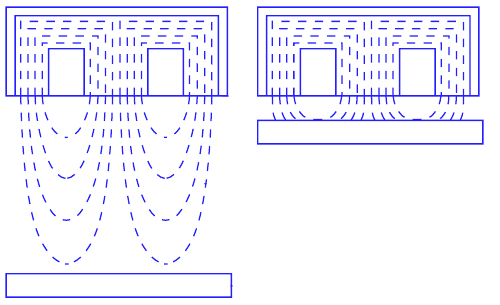
Nézzük most az induktív érzékelő működési elvét. Ahogy fentebb említettük, amikor a fém elég közel van a trigger zónához, az érzékelő aktiválódik. Ez a jelenség az érintettek interakciójában áll induktorok fémmel közeledve, ami élesen megváltoztatja a tekercs mágneses mezőjének nagyságát, ami az érzékelő aktiválásához vezet, kiold, a megfelelő jel megjelenik a kimenetén.
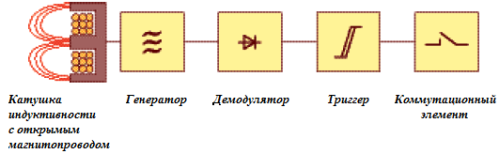
A készülék elektronikus része egy vezérlő áramkört tartalmaz, amely viszont egy relét vagy tranzisztoros kapcsolót vezérel. A következő részekből áll:
-
Generátor, amely elektromágneses teret hoz létre, amely szükséges a tárggyal való kölcsönhatáshoz.
-
Schmitt trigger kapcsolási hiszterézist biztosít.
-
Erősítő a jel amplitúdójának növelésére, hogy az elérje a kívánt aktiválási értéket.
-
LED jelzőfény, amely a kapcsoló állapotáról tájékoztat. Ezenkívül teljesítményfigyelést és konfigurációt is biztosít.
-
Szilárd részecskék és víz behatolása ellen védő vegyület.
-
Ház az érzékelő felszereléséhez és a különböző mechanikai behatások elleni védelemhez Sárgarézből vagy poliamidból készült, rögzítőelemekkel van ellátva.
Az induktív helyzetérzékelőket széles körben használják ipari automatizálási rendszerekben, ahol időszakonként vagy folyamatosan meg kell határozni a mechanizmus bármely részének helyzetét. Az érzékelő jelet generál, amelyet a meghajtóhoz küld. Az indító, a vezérlő, a relé, a frekvenciaváltó stb. végrehajtó mechanizmusként működhet. A lényeg az, hogy az érzékelő paraméterei feszültség és áram tekintetében megfeleljenek a hajtás paramétereinek.
A szenzorok többsége nem tápegység, elsősorban jelzőberendezés, ezért maga az érzékelő általában nem kapcsol semmi nagy teljesítményt, hanem csak vezérel, vezérlőjelet ad, már csatlakoztatható akcióindító eszközként működik. az áramkapcsoláshoz.
A modern induktív helyzetérzékelők leggyakrabban a műanyag vagy fém ház két változatában találhatók: négyszögletes vagy hengeres. A kör keresztmetszetű érzékelő átmérője 4-30 mm lehet, de a leggyakrabban használt átmérők a 18 és 12 mm.
Amikor az érzékelőt felszerelésre szerelik, a fémlemez és az érzékelő működési zónája között rést kell beállítani, általában ez a távolság nem haladja meg az érzékelő átmérőjét, és általában 2-3-szor kisebbnek bizonyul, mint átmérője.
A csatlakozási mód szerint az induktív helyzetérzékelők lehetnek kétvezetékesek, háromvezetékesek, négyvezetékesek és ötvezetékesek.
Kétvezetékes közvetlenül kapcsolja a terhelést, mint pl indítótekercs, vagyis úgy működnek, mint egy hagyományos kapcsoló. A kétvezetékes érzékelők terhelési ellenállást igényelnek, ezért nem mindig alkalmasak megbízható eszközként, de nem veszítik el relevanciájukat.
A terhelést egyszerűen sorba kell kötni az érzékelővel, ha állandó feszültséget használunk, akkor fontos a polaritás betartása, ha a váltakozó polaritás nem fontos, a lényeg a kapcsolt teljesítmény és áram.
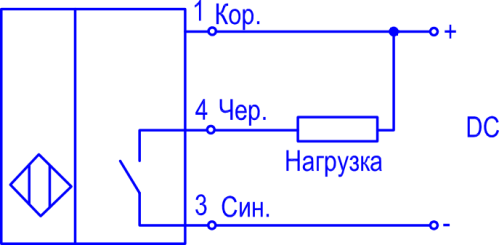
A háromvezetékes érzékelőknek van egy harmadik vezetéke, amely magát az érzékelőt táplálja, és ez a legnépszerűbb megoldás. A négyvezetékes és ötvezetékes érzékelők tranzisztoros vagy relé kimenettel rendelkeznek a terhelés csatlakoztatásához, az ötödik vezeték pedig lehetővé teszi az érzékelő működési módjának, a kimenetek kezdeti állapotának kiválasztását.
Mivel a kimenetek lehetnek relé és tranzisztorok is, az érzékelők ennek megfelelően három típusra oszthatók a kimenetek eszköze szerint: relé, npn és pnp.
Érzékelők relé kimenettel
A relé kimenettel rendelkező érzékelő a tápáramkört galvanikusan leválasztja a mellékelt áramkörről. Egy vezetéket kapcsol, és a kapcsolt áramkör feszültsége nem különösebben kritikus. Mivel az érzékelő tápáramköre galvanikusan le van választva, ez a relé érzékelő előnyének tekinthető. Az ilyen típusú érzékelők általában nagyok.
Érzékelők pnp tranzisztoros kimenettel
Az érzékelő kimenetén pnp tranzisztor található, amely a pozitív vezetéket a terheléssel kommutálja. A kimeneti pnp tranzisztor kollektoráramköréhez terhelés csatlakozik, amely a második vezetékén keresztül állandóan negatívra van kötve.
Érzékelők npn tranzisztoros kimenettel
Az érzékelő kimenetén NPN tranzisztor található, amely a negatív vezetéket a terheléssel kommutálja. A kimeneti npn tranzisztor kollektoráramkörére terhelés csatlakozik, amely a második vezetékével tartósan össze van kötve a pozitív vezetékkel.
A kimenetek kezdeti állapotától függően az induktív helyzetérzékelők lehetnek alaphelyzetben zárt vagy alaphelyzetben nyitott érintkezők. A kezdeti állapot azt jelenti, hogy ez az állapot abban a pillanatban van, amikor az érzékelő még nem aktiválódik, azaz nincs aktiválva.
Ha a kimeneti érintkezők alaphelyzetben zárva vannak, akkor a terhelés üresjáratban, ha alaphelyzetben nyitva van, akkor az érzékelő kioldásáig a terhelés megszakad és a hajtás (pl. mágneskapcsoló) nem kap tápfeszültséget. A normál esetben zárt érintkezőket angol formátumban jelöljük – N.C. (Általában zárt), Normál nyitva - N.O. (Általában nyitva).
Így a tranzisztoros kimenetű érzékelőknek négy típusa van: két típus a vezetőképesség szerint (pnp vagy npn) és két típus a kimenetek kezdeti állapota szerint. A be- és kikapcsoláskor is előfordulhat késés.

Az érzékelőhöz csatlakoztatott meghajtó típusától, valamint a tápellátás módjától függően az érzékelő logikája lehet pozitív vagy negatív. Ez annak a feszültségszintnek köszönhető, amely aktiválja a készülék bemenetét.
Ha a bemenet akkor aktiválódik, amikor a működtető negatív vezetéke a földhöz, a mínuszhoz van kötve, akkor a logikát negatívnak nevezzük, ez a kapcsolat az npn típusú tranzisztoros kimenetű érzékelőkre jellemző.
A pozitív logika megfelel a meghajtó pozitív vezetékének a pozitív tápegységhez való csatlakoztatásának, amikor aktiválva van, ez a logika jellemző a pnp tranzisztoros kimenettel rendelkező érzékelőkre. Leggyakrabban pozitív logika van az induktív érzékelők működésében a mechanizmusok helyzetéhez.
Az induktív helyzetérzékelők régebbi, leggyakrabban használt típusai
Induktív helyzetérzékelők IKV-22
Induktív érzékelők IKV-22. Ezen érzékelők működése azon az elven alapul, hogy a mágneses körben lévő légrés megváltozásakor az acélmaggal rendelkező tekercsek induktív ellenállása megváltozik.
Két tekercses mágneses áramkör egy acéllemezre van felszerelve, műanyag burkolattal lezárva. Két MBGP kondenzátor (az egyik 15 μF kapacitású, 200 V, a másik 10 μF, 400 V) van a lemezre rögzítve az alsó oldalról. A kondenzátorok burkolattal vannak lefedve. A kábel a tömítésen keresztül csatlakozik. A mechanizmusra mágneses sönt van felszerelve, amelynek méretei legalább: vastagság 2 mm, szélesség 80 mm, hosszúság 140 mm. A mágneses kör és a sönt közötti légrés 6 ± 4 mm.
A kimeneti relé általában abban a pillanatban kapcsol be és ki, amikor a mágneses sönt áthalad az érzékelőn, amikor a tekercs induktív ellenállásának változása miatt áramrezonancia lép fel, és a relé tekercsen áthaladó áram leesik. Ezek a relék: MKU-48 típusú, 12 V AC, 0,45 A-nél nem nagyobb áramot vesznek fel, 0,1 A-nél nem kisebb áramot vesznek fel.Az érzékelő áramkör tápfeszültsége 24 V AC relé.
Induktív helyzetérzékelők ID-5
A kohászati műhelyekben ID-5 típusú induktív érzékelőket használnak, amelyeket legfeljebb + 80 ° C-os környezeti hőmérsékleten és 100% páratartalomig terveztek. A vezetőképes por és vízkő elfogadható. Az érzékelőhöz UID-10 típusú félvezető kimeneti erősítőt használnak. Az erősítő kimenő teljesítménye (25 W) elegendő a széles körben elterjedt REV-800 relék, KP21, MK-1 mágneskapcsolók stb.
Az érzékelő és a megfigyelt ferromágneses tárgy közötti légrés legfeljebb 30 mm lehet. Az ID-5 érzékelő méretei 187x170x70 mm, a tápfeszültség 220 V ± 15%, 50 Hz.
Kis méretű BSP érintésmentes kapcsolók
BSP-2 (érintésmentes kimenettel, logikai elemhez) és BRP (PE-21, 24 V, 16 Ohm relé kimenettel) kis mozgáskapcsolókat fémvágó gépeken használják.
A BSP-2 kapcsoló egy differenciál transzformátor érzékelőből és egy félvezető triggerből áll. Az első érzékelőtekercs mágneses rendszerét egy acéllemez mozgatja, a második tekercset pedig a lapos armatúra-mechanizmushoz csatlakoztatott mágneses rendszere felett mozgatva. A tekercsek az ellenkező irányba kapcsolódnak be.
Ha az armatúra az érzékelő felett van, akkor a tekercsek induktív reaktanciái egyenlőek, és a differenciáltranszformátor érzékelő kimenete nulla. Ebben az esetben a trigger kimenetén legalább 2,5 V feszültség jelenik meg, ami elegendő a logikai elem működéséhez.
Az érzékelő feletti armatúra hiányában a triggerre feszültséget kapcsolunk, amely visszaállítja azt eredeti állapotába. Ekkor a kapcsoló kimenőjele nulla.
A BRP kapcsoló működési elve sok tekintetben hasonló a BSP-2-éhoz.A doboz belsejében egy induktív érzékelő (a differenciáltranszformátor áramkörének megfelelően), egy trigger és egy erősítő található. Az eltérő fordulatszámú másodlagos tekercsek ellenkező irányban kapcsolódnak be. Mivel az armatúra átfedi az érzékelő mágneses rendszerét, a jel lecsökken, és a fázisváltás után a trigger bekapcsol és egy külső kimeneti relé (PE-21, 24 V, 16 Ohm) aktiválódik.
A mechanizmushoz rögzített horgony méretei 80x15x3 mm. A horgony és az érzékelő közötti rés 4 mm. A kapcsolók pontossága névleges üzemmódban ± 0,5 mm, a működtetési különbség legfeljebb 5 mm. Nál nél. A tápfeszültség és a hőmérséklet ingadozása esetén a BSP-2 és BRP kapcsolók hibája elérheti a ± (2,5-f-3,0) mm-t.
Nagyfrekvenciás induktív érzékelők VKB
A nagy pontosságú VKB típusú, U-alakú vagy lapos armatúrájú induktív érzékelőket fémvágó gépek automatizálására is használják. A beépített transzformátor pólusai nyitott elektromágneses rendszert alkotnak. Az üzemi légrés 0,1-0,15 mm.
A transzformátor szekunder tekercsének kimeneti feszültsége egy differenciálmérő áramkörbe, majd egy tranzisztoros erősítőbe kerül. Az érzékelő teljes hibája 5 és 40 ° C közötti hőmérséklet-ingadozásokkal és a névleges érték 85 és 110% -a közötti feszültséggel ± (0,064-0,15) mm, a válaszkülönbség nem haladja meg a 0,4 mm-t. A mechanizmus maximális mozgási sebessége 10 m / mm. Érzékelő méretei 62x34x24 mm. Tápfeszültség 12 V.
A differenciáláramkörrel rendelkező fémvágó gépekhez való speciális típusú precíziós induktív érzékelők hibája kisebb, mint ± 0,01 mm.Az ilyen érzékelők közé tartozik a VPB12 típusú érintésmentes mozgáskapcsoló, amely egy elektronikus egységen lévő érzékelőegységből áll. Az érzékelő egység egy induktív munkaérzékelőt, egy induktív kompenzációs érzékelőt és nyomtatott áramköri lapokat tartalmaz. A mechanizmus fel van szerelve: vezérlő ferrit elem. Tápfeszültség 12 V DC. A maximális expozíciós távolság nem haladhatja meg a 0,12 mm-t. Az érzékelő kimenetére RPU-0 típusú relé csatlakoztatható. A kimeneti eszköz maximális terhelőárama 0,16 A.
Generátor helyzetérzékelők
Az ilyen típusú érzékelők kompaktak és nagyon pontosak. A KVD-6M és a KVD-25 sorozatú szenzorgenerátorok (résekkel), a KVP-8 és a KVP-16 (repülőgép) jól beváltak. Alkalmasak nagy nedvesség- és porkoncentrációban történő használatra. Az érzékelő tranzisztor áramkörének elemei (generátor és trigger) ütésálló polisztirol házban helyezkednek el. A tömítés hidegen keményedő keverékkel történik. Az üzemi hőmérséklet tartomány -30 és +50 °C között van.
A HPC érzékelő diszkrét jelet generál, amikor egy fémlemez ("zászló") áthalad a nyíláson, ami meghibásodást okoz a trigger generálásában és kapcsolásában. A nyílás szélessége a KVD-6M érzékelőnél 6 mm, a KVD-25 érzékelőnél 25 mm.
A KVP-8 és KVP-16 érzékelők akkor aktiválódnak, ha egy fémlemez elhalad mellettük legfeljebb 8, illetve 16 mm távolságban.